|
|

|

|
| e-Pub |
Section: New Results
Multi-robot Motion-planning in dynamic environments
Benchmarking and extension of multi-robot strategies
Exploration of unknown and populated environments
Participants : Olivier Simonin, Nassim Kaldé (phd. Student, Larsen Inria Nancy), François Charpillet (inria Larsen, Nancy), Jan Faigl (ctu, Czech University Of Prague).
Exploration of unknown environment with a group of mobile robots consists mainly to compute a strategy that allows to visit efficiently the area while considering different constraints. These constraints can be trajectory coordination (between robots), presence of humans and limits on time, communication, and computational ressources allowed to robots. The exploration problem is related with mapping, surveillance (eg. patrolling) problems. In this context, O. Simonin and P. Lucidarme (University of Angers) published a general article on multi-robot mapping in the magazine Techniques de l'Ingénieur [5] (2015).
Study of frontier-based strategies
In this context, frontier-based approaches looks for an efficient allocation of the navigational goals which must be situated between the known and unknown areas (the frontiers). Goal candidate locations are repeatedly determined during the exploration. Then, the assignment of the candidates to the robots is solved as the task-allocation problem. A more frequent decision-making may improve performance of the exploration, but in a practical deployment of the exploration strategies, the frequency depends on the computational complexity of the task-allocation algorithm and available computational resources. Therefore, we proposed an evaluation framework to study exploration strategies independently on the available computational resources and we reported a comparison of the selected task-allocation algorithms deployed in multi-robot exploration [30] . This work is supported by the French-Czech PHC "Murotex".
Exploration in populated environments
In the context of the Phd of Nassim Kaldé, co-supervized by F. Chapillet (Inria Nancy, Larsen) and O. Simonin (Chroma), we study exploration in populated environments, in which pedestrian flows can severely impact performances. However, humans have adaptive skills for taking advantage of these flows while moving. Therefore, in order to exploit these human abilities, we propose a novel exploration strategy that explicitly allows for human-robot interactions. Our model for exploration in populated environments combines the classical frontier-based strategy with our interactive approach. For this purpose, we proposed an interaction model where robots can locally choose a human guide to follow and define a parametric heuristic to balance interaction and frontier assignments. This model is introduced in publication [3] , where we evaluate to which extent human presence impacts the exploration model in terms of coverage ratio, travelled distance and elapsed time to completion. A simulator, based on V-REP and illustrated in figure 13 .a, has been developped to conduce the experimental measures.
|

Patrolling static and dynamic environments
Participants : Olivier Simonin, Jacques Saraydaryan, Fabrice Jumel, Mihai Popescu, Herve Rivano (inria Urbanet).
Patrolling moving people
In the context of service robotics, we address the problem of serving people by a set of collaborating robots, that is to delever regularly services to moving people. We re-defined this problem as a dynamic patrolling task, that we called the robot-waiters problem, where robots have to regularly visit all the moving persons. In the publication [11] , we proposed different criteria and metrics suitable to this problem, by considering not only the time to patrol all the people but also the equity of the delivery. We proposed and compared four algorithms, two are based on standard solutions to the static patrolling problem and two are defined according the specificity of patrolling moving entities. In order to limit robot traveled distances, the last approach introduces a clustering heuristic to identify groups among people. To compare algorithms and to prepare real experiments we developped a simulator combining a pedestrian model (PedSim) and a robotic model, illustrated in figure 13 .b. Experimental results show the efficiency of the specific new approaches over standard approaches. We also analysed the influence of the number of robots on the performances, for each approach.
We are currently developping new algorithms using the mapping and prediction of human flows based on the work presented in section 7.4.2 .
Patrolling WSN
In the multi-robot patrolling context, we investigated the problem of visiting regularly a set of fixed sensors by computing single-cycles on the graph formed by the WSN (Wireless sensors network). We set this problem as a graph covering with bounded hamiltonian cycles (in the M2R internship of Mihai-Ioan Popescu, now continuing as PhD student in Chroma). After giving insights of NP-hardness, we proposed a generic heuristic algorithm for solving the GCBHC. It works in two steps: the first one partitions the vertices, the second one computes hamiltonian cycles on each partition. We adapted the classic Multilevel Subgraph Partitioning algorithm to the specific requirements yielded by the networking metrics. To avoid the high complexity of this algorithm, we proposed another heuristic which exploits the geometric structure of the graph, the North-Eastern Neighbour heuristic. We implemented two classic hamiltonian cycle heuristics, one is based on Minimum Spanning Trees computations and the other on Christofides algorithm. Comparisons on randmly-generated graphs showed that the Christofides algorithm computes shorter cycles. An article presenting this work has been written and will be submitted soon.
Anytime algorithms for multi-robot cooperation
Observation of complex scenes
Participants : Olivier Simonin, Jilles Dibangoye, Laetitia Matignon (liris), Christian Wolf (liris), Jonathan Cohen (internship), Stefan Chitic.
Solving complex tasks with a fleet of robots requires to develop generic strategies that can decide in real time (or time-bounded) efficient and cooperative actions. This is particularly challenging in complex real environments. To this end, we explore anytime algorihms and adaptive/learning techniques.
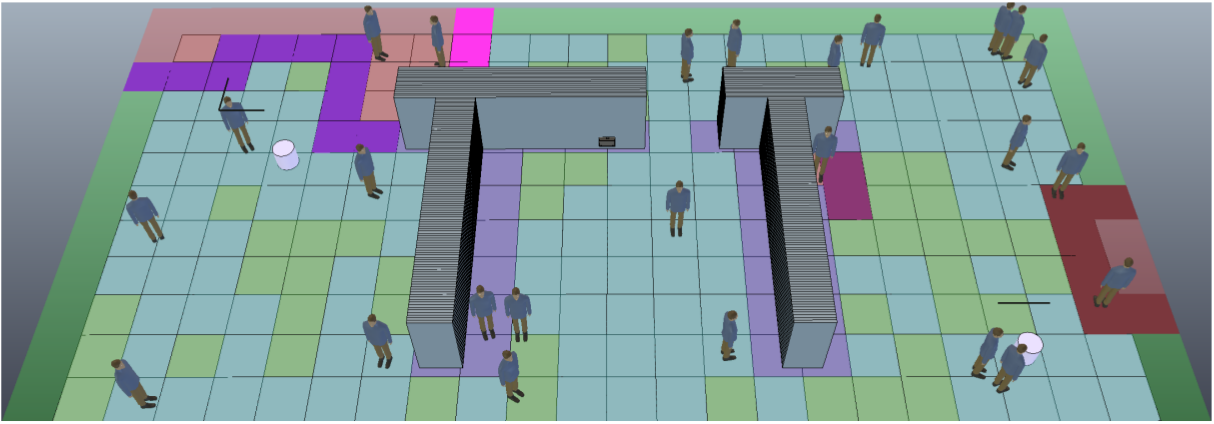
The INSA BQR project "Crome" (Coordination d'une flottille de robots mobiles pour l'analyse multi-vue de scènes complexes), led by O. Simonin, motivated the exploration of the joint-observation of complex (dynamic) scenes by a fleet of mobile robots. In our current work, the considered scenes are defined as a sequence of activities, performed by a person in a same place. Then, mobile robots have to cooperate to find a spatial configuration around the scene that maximizes the joint observation of the human pose skeleton. It is assumed that the robots can communicate but have no map of the environment and no external localisation.
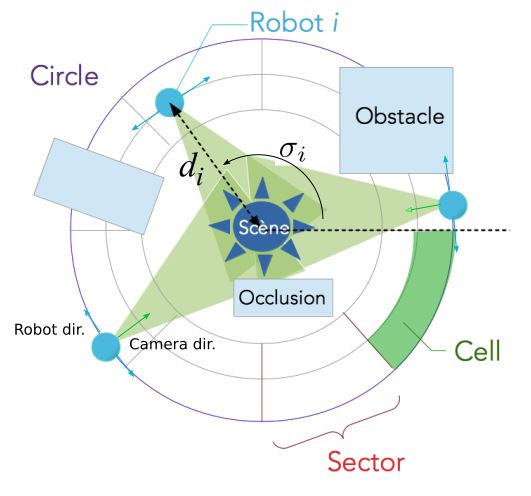
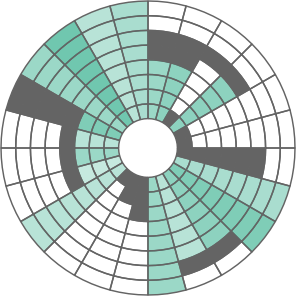
To attack the problem, in cooperation with colleagues from vision (C. Wolf, Liris), we proposed an original concentric navigation model allowing to keep easily each robot camera towards the scene (see fig. 14 .a). This model is combined with an incremental mapping of the environment in order to limit the complexity of the exploration state space. We have also defined the marginal contribution of each robot observation, to facilitate stability in the search, while the exploration is guided by a meta-heuristics. We developped a simulator (fig. 14 .b) that allows to compare the variants of the approach and to show its features such as adaptation to the dynamic of the scene and robustness to the noise in the observations. Preliminary results have been presented in [8] .
We have also developped an experimental framework, using Turtlebot2 robots, presented in figure 14 .c. Experimental measures and validation are in progress.
|

Middleware for multi-robot systems deployment
Participants : Stefan Chitic, Julien Ponge (citi, Dynamid), Olivier Simonin.
Multi-robots systems (MRS) require dedicated tools and models to face the complexity of their design and deployment (there is no or very limited tools/middleware for MRS). In this context, we addressed the problem of neighbors and service discovery in an ad-hoc network formed by a fleet of robots. Robots needs a protocol that is able to constantly discover new robots in their coverage area. This led us to propose a robotic middleware, SDfR, that is able to provide service discovery. This protocol is an extension of the Simple Service Discovery Protocol (SSDP) used in Universal Plug and Play (UPnP) to dynamic networks generated by the mobility of the robots. Even if SDfR is platform independent, we proposed a ROS integration in order to facilitate the usage. We evaluated a series of overhead benchmarking across static and dynamic scenarios. Eventualy, we experimented some use-cases where our proposal was successfully tested with Turtlebot 2 robots. Results have been presented to the national conference CAR'2015 and will appear in the international conference ICAART 2016 (accepted).
Sequential decision-making under uncertainty
Sequential decision-making under uncertainty is a core area of artificial intelligence, optimization, operations research, machine learning, and robotics. It involves one or multiple decision makers (or agents or robots) reasoning about the course of actions to achieve collective or self-interested goals while accounting both for the outcomes of current decisions and for future decision-making opportunities. Markov models (e.g., Markov decision processes and Markov games) have emerged as normative frameworks for optimizing decision under uncertainty. These models encompass a wide range of real-world applications: controlling intelligent vehicles; optimizing the production and distribution of energy resources; protecting endangered species; making telecommunication protocols faster and safer; monitoring and assisting elderly patients at home; designing robotic exploration technologies for search and rescue; but also many other applications. Decentralized partially observable Markov decision processes have emerged as the fundamental model to address multiple decision makers' decision-theoretic planning and learning problems. In that direction, we investigate generic, highly scalable and adaptable planning and learning algorithms to apply eventually in multi-robot planning tasks.
Structural results for cooperative decentralized control problems
Participants : Jilles S. Dibangoye, Olivier Simonin, Olivier Buffet (inria Nancy, Ex Maia Team), Mamoun Idrissi (internship, Insa de Lyon).
The intractability in cooperative, decentralized control problems is mainly due to prohibitive memory requirements in both optimal policies and value functions. The complexity analysis has emerged as the standard method to estimating the memory needed for solving a given computational problem, but complexity results may be somewhat limited. Our work [13] introduces a general methodology, called the structural analysis, for the design of optimality-preserving concise policies and value functions, which will eventually lead to the development of efficient theory and algorithms. For the first time, we showed that memory requirements for policies and value functions may be asymmetric, resulting in cooperative, decentralized control problems with exponential reductions in memory requirements. To apply this theoretical in robotics, we investigate during M. Idrissi's internship the robotic coverage of unknown areas.
State-of-the-art algorithms for optimally solving Dec-POMDPs
Participants : Jilles S. Dibangoye, Christopher Amato (univ. New Hampshire), Olivier Buffet (inria Nancy, Ex Maia Team), François Charpillet (inria Nancy, Larsen Team), Martin Pugnet (master Student, U. Claude Bernard Lyon).
Decentralized partially observable Markov decision processes (Dec-POMDPs) provide a general model for decision-making under uncertainty in cooperative decentralized settings but are difficult to solve optimally (NEXP-Complete). As a new way of solving these problems, we introduced the idea of transforming a Dec-POMDP into a continuous-state deterministic MDP with a piecewise-linear and convex value function. This approach makes use of the fact that planning can be accomplished in a centralized offline manner while execution can still be decentralized. This new Dec-POMDP formulation, which we call an occupancy MDP, allows powerful POMDP and continuous-state MDP methods to be used for the first time. To provide scalability, we refine this approach by combining heuristic search and compact representations that exploit the structure present in multi-agent domains, without losing the ability to converge to an optimal solution. In particular, in [14] , we introduce a feature-based heuristic search value iteration (FB-HSVI) algorithm that relies on feature-based compact representations, point-based updates, and efficient action selection. However, scalability remains limited when the number of agents or problem variables becomes large. To overcome this limitation, we show that, under certain separability conditions of the optimal value function, the scalability of this approach can increase considerably. This separability is present when there is the locality of interaction between agents, which can be exploited to improve performance. A theoretical analysis demonstrates that FB-HSVI terminates in finite time with an optimal solution. We include an extensive empirical analysis using well-known benchmarks, thereby confirming that our approach provides significant scalability improvements compared to the state of the art. We push even further the envelope, during Martin's internship, assuming we only have access to an incomplete model of the world. This more realistic assumption that would ease application to robotics leads us directly to learning algorithms inspired from FB-HSVI.
Distributed projected gradient-descent algorithm applied to smart grids
Participants : Jilles S. Dibangoye, Arnaud Doniec (uria – Ecole Des Mines de Douai, France), H. Fakham, F. Colas And X. Guillaud (l2ep – Arts Et Métiers Paristech, France).
In a smart grid context, the increasing penetration of embedded generation units leads to a greater complexity in the management of production units. In this work, we focus on the impact of the introduction of decentralized generation for the unit commitment (UC) problem. Unit commitment problems consist in finding the optimal schedules and amounts of power to be generated by a set of generating units in response to an electricity demand forecast. While this problem has received a significant amount of attention, classical approaches assume that these problems are centralized and deterministic. However, these two assumptions are not realistic in a smart grid context. Indeed, finding the optimal schedules and amounts of power to be generated by multiple distributed generator units is not trivial since it requires to deal with distributed computation, privacy, stochastic planning, etc. Our contribution focuses on smart grid scenarios where the main source of complexity comes from the proliferation of distributed generating units. In solving this issue, we consider distributed stochastic unit commitment problems. In [2] , we introduce a novel distributed gradient descent algorithm which allows us to circumvent classical assumptions. This algorithm is evaluated through a set of experiments on real-time power grid simulator.